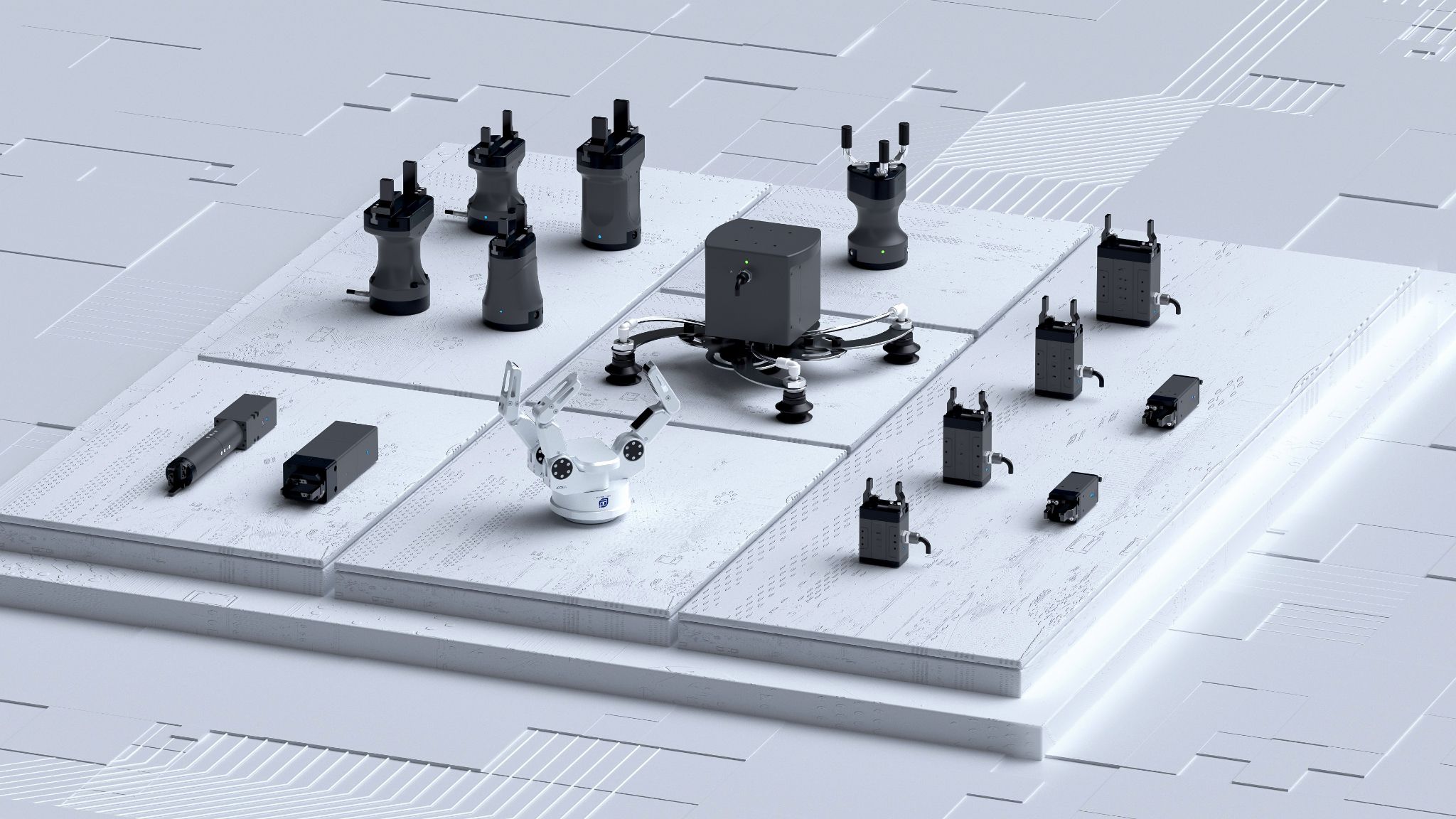
Endüstriyel Robot Uç Efektörü / Becerikli Robot Eli
Elektrikli uç efektör, endüstriyel robotların ucunda bulunan ve kavrama, tutma, vakumlama, taşıma ve montaj gibi hassas işlemleri gerçekleştiren temel bir bileşendir. Elektrikli tahrik sayesinde yüksek hız ve yüksek hassasiyetli kontrol sağlar; pnömatik ve hidrolik sistemlerin yerini alır. 3C üretimi, otomotiv montajı ve yeni enerji batarya üretimi gibi alanlarda yaygın olarak kullanılır.
Servo tahrik, akıllı algılama ve modüler tasarım gibi teknolojilerle esnek üretim ihtiyaçlarını karşılar. Elektrikli uç efektörler; elektrikli kıskaçlar, vakumlu tutucular, robotik eller ve mikro silindirler olarak sınıflandırılır.
Becerikli Robot El
 Yüksek Hassasiyetli Teleoperasyon Mekanik Dış İskelet EldiveniHonpine EG mekanik dış iskelet eldiveni, yüksek hassasiyetli el hareketi yakalama ve yardımcı kontrol için özel olarak tasarlanmış bir dış iskelet eldiveni ürünüdür. Çekirdek manyetik kodlayıcı teknolojisiyle donatılan eldiven, yalnızca el eklem açısı algılamasında yüksek hassasiyet sağlamakla kalmaz, aynı zamanda konum kaymasını da ortadan kaldırır. Ayrıca, ESP-NOW kablosuz iletim teknolojisini dinamik eşleme kalibrasyon algoritmasıyla entegre ederek, becerikli ellerin yüksek hassasiyetli teleoperasyonunu mümkün kılar. Şu anda ürün, endüstriyel üretim, tıbbi rehabilitasyon, bilimsel araştırma ve diğer alanlarda yaygın olarak uygulanmakta olup, farklı senaryoların pratik uygulama ihtiyaçlarını karşılamaktadır.Detaylar
Yüksek Hassasiyetli Teleoperasyon Mekanik Dış İskelet EldiveniHonpine EG mekanik dış iskelet eldiveni, yüksek hassasiyetli el hareketi yakalama ve yardımcı kontrol için özel olarak tasarlanmış bir dış iskelet eldiveni ürünüdür. Çekirdek manyetik kodlayıcı teknolojisiyle donatılan eldiven, yalnızca el eklem açısı algılamasında yüksek hassasiyet sağlamakla kalmaz, aynı zamanda konum kaymasını da ortadan kaldırır. Ayrıca, ESP-NOW kablosuz iletim teknolojisini dinamik eşleme kalibrasyon algoritmasıyla entegre ederek, becerikli ellerin yüksek hassasiyetli teleoperasyonunu mümkün kılar. Şu anda ürün, endüstriyel üretim, tıbbi rehabilitasyon, bilimsel araştırma ve diğer alanlarda yaygın olarak uygulanmakta olup, farklı senaryoların pratik uygulama ihtiyaçlarını karşılamaktadır.Detaylar VR AR Uzaktan Operasyonlar için Akıllı Robotik Teleoperasyon EldiveniHONPINE Teleoperasyon Eldiveni, akıllı robotik ve uzaktan kontrol uygulamaları için tasarlanmış yüksek hassasiyetli bir el hareket yakalama cihazıdır. Gelişmiş hareket yakalama teknolojisi ve şirketin bağımsız olarak geliştirdiği dinamik eşleme algoritmasına dayanan bu eldiven, becerikli robot ellerin hassas şekilde kontrol edilmesini sağlar. El hareketlerini gerçek zamanlı olarak yakalayıp ileterek kullanıcıların robot elleri doğal ve sezgisel bir şekilde çalıştırmasına olanak tanır ve uzaktan operasyonlar, sanal gerçeklik (VR), artırılmış gerçeklik (AR) ve akıllı üretim gibi çeşitli uygulama senaryolarının ihtiyaçlarını karşılar.Detaylar
VR AR Uzaktan Operasyonlar için Akıllı Robotik Teleoperasyon EldiveniHONPINE Teleoperasyon Eldiveni, akıllı robotik ve uzaktan kontrol uygulamaları için tasarlanmış yüksek hassasiyetli bir el hareket yakalama cihazıdır. Gelişmiş hareket yakalama teknolojisi ve şirketin bağımsız olarak geliştirdiği dinamik eşleme algoritmasına dayanan bu eldiven, becerikli robot ellerin hassas şekilde kontrol edilmesini sağlar. El hareketlerini gerçek zamanlı olarak yakalayıp ileterek kullanıcıların robot elleri doğal ve sezgisel bir şekilde çalıştırmasına olanak tanır ve uzaktan operasyonlar, sanal gerçeklik (VR), artırılmış gerçeklik (AR) ve akıllı üretim gibi çeşitli uygulama senaryolarının ihtiyaçlarını karşılar.Detaylar- Yüksek Hassasiyetli Kontrol 21-DoF Endüstriyel Becerikli İnsan EliHONPINE L30, ince insan el hareketlerini milimetre düzeyinde çalışma hassasiyetiyle doğru şekilde taklit eden 21-DoF becerikli bir eldir. Kararlı hareket ve hassas kontrol için gelişmiş tendon tahriki ve yüksek düzeyde entegre mekatronik sistemleri benimser ve gerçek zamanlı algılama ile etkileşim güvenilirliğini artırmak için çok modlu algılamayı (kuvvet, dokunma, görme) destekler. Yüksek DoF, çok modlu algılama ve lider hareket kontrol algoritmalarıyla, endüstriyel otomasyon, tıbbi yardım ve araştırma deneylerinde yaygın olarak kullanılır—yüksek derecede uyarlanabilir, güvenilir bir uç efektör çözümü sunar.Detaylar
- Yüksek Hassasiyetli 21-DoF Doğal İnsan Eli Kavrama Becerikli ElHONPINE L20, hassas işlemlerle doğal insan eli kavramasını doğru şekilde simüle eden 21-DoF bir becerikli eldir. Yüksek hassasiyetli hareket için yenilikçi bağlantı iletimi ve kendi geliştirdiği motorları benimser ve kuvvet, görme ve dokunsal sensörleri destekler—çok modlu algılama yoluyla çevresel uyarlanabilirliği ve akıllı etkileşimi geliştirir. Yüksek DoF, çok modlu algılama ve kuvvet-konum hibrit algoritmaları ile eğitim ve araştırma, endüstriyel otomasyon, ev içi yardım ve yaşlı bakımı alanlarında yaygın olarak kullanılır—hassas, becerikli operasyon çözümleri sunar.Detaylar
- Yüksek Performanslı Hassas Kontrollü Robot İnsan Biyonik Çevik ElHONPINE Robot Hand L10, 20 DoF'lu yüksek performanslı becerikli bir eldir. Kendi geliştirdiği motorlar ve bağlantı iletim mekanizmalarıyla donatılmış olup, hassas kontrol ve akıcı hareket sağlarken çekiş kararlılığını güvence altına alır. Eğitim & araştırma, piyano performansı, ev içi yardım ve yaşlı bakımı alanlarında yaygın olarak kullanılır; akıllı robotların ve insan-robot iş birliğinin gelişimini ve uygulanmasını destekler. Çeşitli sensörler aracılığıyla çok modlu
çevresel algıyı destekler ve ROS/QT ortamlarıyla uyumludur (ikincil geliştirme için standart ROS eklentileriyle birlikte).Detaylar  Robotik Sistemler için Yüksek Performanslı 17 DoF Becerikli ElHONPINE 07 robot eli, 17 DoF'a sahip yüksek performanslı bir becerikli eldir. Kendi geliştirdiği motorlarla çalıştırılan bu ürün, maliyet kontrolünü güvenilir kavrama ve çalışma performansıyla dengeler ve çeşitli uygulama ihtiyaçlarını karşılar. İkincil geliştirme için ROS eklentileri sunar; eğitim ve araştırma, yardımcı kavrama ve akıllı etkileşim için uygundur—robotik sistemler için verimli ve ekonomik bir becerikli el çözümü sunar.Detaylar
Robotik Sistemler için Yüksek Performanslı 17 DoF Becerikli ElHONPINE 07 robot eli, 17 DoF'a sahip yüksek performanslı bir becerikli eldir. Kendi geliştirdiği motorlarla çalıştırılan bu ürün, maliyet kontrolünü güvenilir kavrama ve çalışma performansıyla dengeler ve çeşitli uygulama ihtiyaçlarını karşılar. İkincil geliştirme için ROS eklentileri sunar; eğitim ve araştırma, yardımcı kavrama ve akıllı etkileşim için uygundur—robotik sistemler için verimli ve ekonomik bir becerikli el çözümü sunar.Detaylar- Yüksek Hassasiyetli Kompakt Yüksek Kavrama Kuvvetli Biyonik Maharetli ElHONPINE O6 biyonik maharetli el, 6 aktif ekleme ve 5 pasif ekleme sahiptir. Yüksek kavrama kuvveti, hassas kuvvet kontrolü, kompakt boyut ve hafif tasarım sunar. Özellikle lojistik taşıma, endüstriyel montaj ve düzensiz şekilli nesnelerin kavranması gibi uygulamalar için uygundur.Detaylar
- İnsansı Parmak Eklem Tasarımlı Robot Hünerli ElRobot hünerli el, insan elini yüksek düzeyde taklit eden bir robot uç efektörüdür. Beş parmaklı insansı yapı tasarımını benimser ve kavrama ile sıkıştırma gibi hassas işlemleri gerçekleştirmek için 15'ten fazla serbestlik derecesi aracılığıyla insan elinin eklem hareketlerini simüle eder. Robotun karmaşık görevleri yerine getirmesi için temel bileşendir. Robot uç efektöründe kavrayıcı tipi cihaza aittir. Geleneksel iki parmaklı kavrayıcıdan farklı olarak, çok modlu algılama ve akıllı kontrol yeteneklerine sahiptir, düzensiz nesnelere uyum sağlayabilir ve hassas operasyon görevlerini tamamlayabilir.Detaylar








Elektrikli Tutucu
 HONPINE WEPG Serisi Gıda Endüstrisi Tartım Özellikli Elektrikli TutucularHONPINE WEPG Serisi Tartımlı Elektrikli Tutucular şu anda WEPG01, WEPG05, WEPG-T08 ve WEPG-T15 modellerini içerir ve sırasıyla 1 kg, 5 kg, 8 kg ve 15 kg maksimum yük kapasitelerini kapsar. Bu ürün yelpazesi, lityum pil üretiminin ağırlık gereksinimlerini tam olarak destekler ve çoğu endüstriyel tartım uygulamasını kapsar.
HONPINE WEPG Serisi Gıda Endüstrisi Tartım Özellikli Elektrikli TutucularHONPINE WEPG Serisi Tartımlı Elektrikli Tutucular şu anda WEPG01, WEPG05, WEPG-T08 ve WEPG-T15 modellerini içerir ve sırasıyla 1 kg, 5 kg, 8 kg ve 15 kg maksimum yük kapasitelerini kapsar. Bu ürün yelpazesi, lityum pil üretiminin ağırlık gereksinimlerini tam olarak destekler ve çoğu endüstriyel tartım uygulamasını kapsar.
Lityum pil üretim hatlarında yaygın kullanımının yanı sıra, WEPG Serisi otomotiv, ilaç ve gıda işleme sektörlerinde de başarıyla uygulanmış olup, birden fazla sektörde referans müşterilere sahiptir. Seri ayrıca çok senaryolu tartım uygulamaları için özelleştirilmiş çözümleri destekler.Detaylar HONPINE EPG-FLEX Serisi Hassas Üretim için Elektrikli Paralel TutucularKüçük partili, çok çeşitli esnek üretimin yükselişiyle birlikte, otomasyon ekipmanlarının hızlı şekilde yeniden yapılandırılması zorunlu hale gelmiştir. Geleneksel sabit tasarımlı elektrikli tutucular, üretim süreçlerindeki ve uygulama senaryolarındaki sık değişiklikleri karşılamakta çoğu zaman yetersiz kalır.
HONPINE EPG-FLEX Serisi Hassas Üretim için Elektrikli Paralel TutucularKüçük partili, çok çeşitli esnek üretimin yükselişiyle birlikte, otomasyon ekipmanlarının hızlı şekilde yeniden yapılandırılması zorunlu hale gelmiştir. Geleneksel sabit tasarımlı elektrikli tutucular, üretim süreçlerindeki ve uygulama senaryolarındaki sık değişiklikleri karşılamakta çoğu zaman yetersiz kalır.
HONPINE EPG-FLEX Serisi Elektrikli Paralel Tutucular, modüler standartlaştırma ve esnek yapılandırma konseptine dayanarak bu talebi karşılamak üzere tasarlanmıştır. HONPINE'in elektrikli tutucu portföyünde gelişmiş bir yükseltme olan EPG-FLEX Serisi, karmaşık endüstriyel otomasyon ortamları için daha uyarlanabilir bir çözüm sunar.
Seri, 3C elektronik sektöründe çok tipli bileşen montajı, yeni enerji üretim hatlarında çok istasyonlu geçiş ve yarı iletken üretiminde yardımcı malzeme taşıma gibi uygulamalarda güçlü performans göstermiştir.Detaylar Endüstriyel otomasyon için elektrikli paralel tutucu pnömatik tutucuların kolayca yerini alırHONPINE EPG-ST Serisi Elektrikli Paralel Tutucular, al-ve-yerleştir ve malzeme taşıma uygulamalarında geleneksel pnömatik tutucular için uygun maliyetli bir alternatif olarak tasarlanmıştır. Entegre motor, sürücü ve kontrolör ile mevcut üretim hatlarında değişiklik yapmadan aynı boyuttaki pnömatik tutucuların doğrudan değiştirilmesini sağlar. Pnömatik çözümlerle karşılaştırıldığında, EPG-ST Serisi basınçlı hava tüketimini azaltır, kurulum ve kullanımı basitleştirir ve daha yüksek kontrol ile güvenilirlik sunar. 3C elektronik montajı, yeni enerji bataryası taşıma ve yaşam bilimleri laboratuvarları gibi uygulamalarda kendini kanıtlayan EPG-ST Serisi, pnömatikten elektrikli otomasyona geçişi hızlandırmak için verimli ve kullanıcı dostu bir çözüm sunar.Detaylar
Endüstriyel otomasyon için elektrikli paralel tutucu pnömatik tutucuların kolayca yerini alırHONPINE EPG-ST Serisi Elektrikli Paralel Tutucular, al-ve-yerleştir ve malzeme taşıma uygulamalarında geleneksel pnömatik tutucular için uygun maliyetli bir alternatif olarak tasarlanmıştır. Entegre motor, sürücü ve kontrolör ile mevcut üretim hatlarında değişiklik yapmadan aynı boyuttaki pnömatik tutucuların doğrudan değiştirilmesini sağlar. Pnömatik çözümlerle karşılaştırıldığında, EPG-ST Serisi basınçlı hava tüketimini azaltır, kurulum ve kullanımı basitleştirir ve daha yüksek kontrol ile güvenilirlik sunar. 3C elektronik montajı, yeni enerji bataryası taşıma ve yaşam bilimleri laboratuvarları gibi uygulamalarda kendini kanıtlayan EPG-ST Serisi, pnömatikten elektrikli otomasyona geçişi hızlandırmak için verimli ve kullanıcı dostu bir çözüm sunar.Detaylar Yüksek Hassasiyetli ZR Doğrusal Döner Rotary AktüatörDoğrusal rotary aktüatör (ZR aktüatörü olarak da bilinir), doğrusal kaldırma (Z ekseni) ve 360° dönüş (R ekseni) işlevlerini birleştiren, yüksek düzeyde entegre edilmiş iki boyutlu bir hareket modülüdür. Hassas doğrusal hareket için bir doğrusal motor ve dönme hareketini sürmek için bir servo motor kullanır. İki eksenin birleştirilmesiyle kaldırma, döndürme ve açı kalibrasyonu gibi senkronize bileşik hareketler gerçekleştirebilir. Yarı iletken çip yerleştirme ve hassas montaj gibi yüksek hassasiyet gerektiren uygulamalar için idealdir.Detaylar
Yüksek Hassasiyetli ZR Doğrusal Döner Rotary AktüatörDoğrusal rotary aktüatör (ZR aktüatörü olarak da bilinir), doğrusal kaldırma (Z ekseni) ve 360° dönüş (R ekseni) işlevlerini birleştiren, yüksek düzeyde entegre edilmiş iki boyutlu bir hareket modülüdür. Hassas doğrusal hareket için bir doğrusal motor ve dönme hareketini sürmek için bir servo motor kullanır. İki eksenin birleştirilmesiyle kaldırma, döndürme ve açı kalibrasyonu gibi senkronize bileşik hareketler gerçekleştirebilir. Yarı iletken çip yerleştirme ve hassas montaj gibi yüksek hassasiyet gerektiren uygulamalar için idealdir.Detaylar Endüstriyel Akıllı Robot Servo Elektrikli TutucuRobot elektrikli tutucu, servo motorla tahrik edilen akıllı bir uç efektördür, endüstriyel otomasyon senaryoları için tasarlanmıştır ve robot ucunda hassas malzeme kavrama, taşıma ve montaj gerçekleştirebilir. Çekirdeği bir motor, bir redüksiyon mekanizması, bir sensör ve bir kontrol sisteminden oluşur ve milimetre seviyesinden mikron seviyesine kadar hassasiyetle adaptif kavramayı destekler ve elektronik bileşenler, tıbbi ekipmanlar ve hassas parçalar gibi mikro iş parçalarının esnek üretimi için uygundur.Detaylar
Endüstriyel Akıllı Robot Servo Elektrikli TutucuRobot elektrikli tutucu, servo motorla tahrik edilen akıllı bir uç efektördür, endüstriyel otomasyon senaryoları için tasarlanmıştır ve robot ucunda hassas malzeme kavrama, taşıma ve montaj gerçekleştirebilir. Çekirdeği bir motor, bir redüksiyon mekanizması, bir sensör ve bir kontrol sisteminden oluşur ve milimetre seviyesinden mikron seviyesine kadar hassasiyetle adaptif kavramayı destekler ve elektronik bileşenler, tıbbi ekipmanlar ve hassas parçalar gibi mikro iş parçalarının esnek üretimi için uygundur.Detaylar 360° Hassas Kontrollü Elektrikli Döner Kavrayıcı Uç EfektörElektrikli döner kavrayıcı, kavrama ve dönme işlevlerini birleştiren mekatronik bir uç efektördür. İş parçasını kavrama süreci sırasında eşzamanlı dönüş elde etmek için dahili servo motor aracılığıyla dişli veya senkron kayış mekanizmasını tahrik eder (şişe kapaklarını vidalama ve dişlileri monte etme gibi). Temel yapısı bir motor, bir redüktör, bir kavrayıcı mekanizma ve bir kontrolörden oluşur. Kör nokta olmadan 360° dönüşü ve dönüş açısının hassas kontrolünü destekler ve otomatik montaj hatları ile laboratuvar cihazı operasyonları gibi sahneler için uygundur.Detaylar
360° Hassas Kontrollü Elektrikli Döner Kavrayıcı Uç EfektörElektrikli döner kavrayıcı, kavrama ve dönme işlevlerini birleştiren mekatronik bir uç efektördür. İş parçasını kavrama süreci sırasında eşzamanlı dönüş elde etmek için dahili servo motor aracılığıyla dişli veya senkron kayış mekanizmasını tahrik eder (şişe kapaklarını vidalama ve dişlileri monte etme gibi). Temel yapısı bir motor, bir redüktör, bir kavrayıcı mekanizma ve bir kontrolörden oluşur. Kör nokta olmadan 360° dönüşü ve dönüş açısının hassas kontrolünü destekler ve otomatik montaj hatları ile laboratuvar cihazı operasyonları gibi sahneler için uygundur.Detaylar Hızlı Stabil Robot Elektrikli Paralel TutucuElektrikli paralel tutucu, hassas motor tahriki ve iletim mekanizması sayesinde nesnelerin hızlı ve stabil şekilde kavranmasını sağlayan yenilikçi bir robot uç efektörüdür. Tutucu parmakları bir düzlem üzerinde paralel hareket eder; maksimum ayarlanabilir strok 0-180mm, tek parmak kavrama kuvveti ise 2N~800N'dir. Gelişmiş motor teknolojisi ve yapay zeka algoritmaları kullanarak çeşitli karmaşık ortamlarda kavrama yöntemini otomatik olarak ayarlar ve farklı nesne şekilleri, boyutları ve konumlarına uyum sağlar. Bu cihaz harici hava kaynağı gerektirmez, kompakt bir yapıya sahiptir, birden fazla montaj yöntemini destekler ve küçük alanlarda kuruluma uygundur.Detaylar
Hızlı Stabil Robot Elektrikli Paralel TutucuElektrikli paralel tutucu, hassas motor tahriki ve iletim mekanizması sayesinde nesnelerin hızlı ve stabil şekilde kavranmasını sağlayan yenilikçi bir robot uç efektörüdür. Tutucu parmakları bir düzlem üzerinde paralel hareket eder; maksimum ayarlanabilir strok 0-180mm, tek parmak kavrama kuvveti ise 2N~800N'dir. Gelişmiş motor teknolojisi ve yapay zeka algoritmaları kullanarak çeşitli karmaşık ortamlarda kavrama yöntemini otomatik olarak ayarlar ve farklı nesne şekilleri, boyutları ve konumlarına uyum sağlar. Bu cihaz harici hava kaynağı gerektirmez, kompakt bir yapıya sahiptir, birden fazla montaj yöntemini destekler ve küçük alanlarda kuruluma uygundur.Detaylar







Mikro Elektrikli Silindir

Elektrikli Vakumlu Emiş Kupası
 Endüstriyel Otomasyonda Paletleme için EVS Serisi Elektrikli Vakum AktüatörüHONPINE EVS Serisi Elektrikli Vakum Aktüatörü, al-yerleştir, paletleme ve malzeme taşıma gibi endüstriyel otomasyon uygulamaları için tasarlanmış kompakt ve enerji verimli bir EOAT çözümüdür.
Endüstriyel Otomasyonda Paletleme için EVS Serisi Elektrikli Vakum AktüatörüHONPINE EVS Serisi Elektrikli Vakum Aktüatörü, al-yerleştir, paletleme ve malzeme taşıma gibi endüstriyel otomasyon uygulamaları için tasarlanmış kompakt ve enerji verimli bir EOAT çözümüdür.
Yalnızca 2.5 kg ağırlığında ve 10 kg'a kadar yük kapasitesine sahip olan bu ürün, hafif bir yapı içinde güçlü performans sunar. 24 V düşük voltajlı bir sistemle çalışan ürün, enerji tüketimini geleneksel pnömatik sistemlerin yaklaşık 20%'sine düşürerek işletme maliyetlerinin azaltılmasına yardımcı olur.
EVS, farklı iş parçaları için 102 N ile 510 N arasında ayarlanabilir emiş kuvvetine sahiptir. Kompakt tasarımı, pnömatik çözümlerden 30% daha küçüktür ve bu da onu alanı sınırlı robot uygulamaları için uygun hale getirir.
Doğrudan robota montaj, gerçek zamanlı vakum geri bildirimi ve akıllı izleme işlevleriyle EVS, otomatik üretim hatlarında kararlı, verimli ve güvenilir çalışma sağlar.Detaylar Robot Elektrikli Vakumlu VantuzRobot elektrikli vakumlu vantuz, vakum adsorpsiyonu prensibine dayanan elektrikle tahrik edilen bir uç efektördür. Nesne kavrama için negatif basınç oluşturmak üzere dahili bir vakum pompası kullanır ve geleneksel manuel taşıma yöntemlerinin yerini etkili bir şekilde alır. Temel tasarım, akıllı bir kontrol sistemi ve çok katmanlı bir sızdırmazlık yapısını entegre ederek fayans, taş plakalar ve cam gibi pürüzsüz veya hafif pürüzlü yüzeylerin taşınması için uygun hale getirir.Detaylar
Robot Elektrikli Vakumlu VantuzRobot elektrikli vakumlu vantuz, vakum adsorpsiyonu prensibine dayanan elektrikle tahrik edilen bir uç efektördür. Nesne kavrama için negatif basınç oluşturmak üzere dahili bir vakum pompası kullanır ve geleneksel manuel taşıma yöntemlerinin yerini etkili bir şekilde alır. Temel tasarım, akıllı bir kontrol sistemi ve çok katmanlı bir sızdırmazlık yapısını entegre ederek fayans, taş plakalar ve cam gibi pürüzsüz veya hafif pürüzlü yüzeylerin taşınması için uygun hale getirir.Detaylar


Becerikli Robot Eli- SSS
1. Becerikli Eller
Becerikli eller, insan ellerini taklit eden, insansı robotlar için kavrama, bükme, döndürme ve diğer karmaşık görevleri mümkün kılan yüksek-DOF uç efektörleridir.
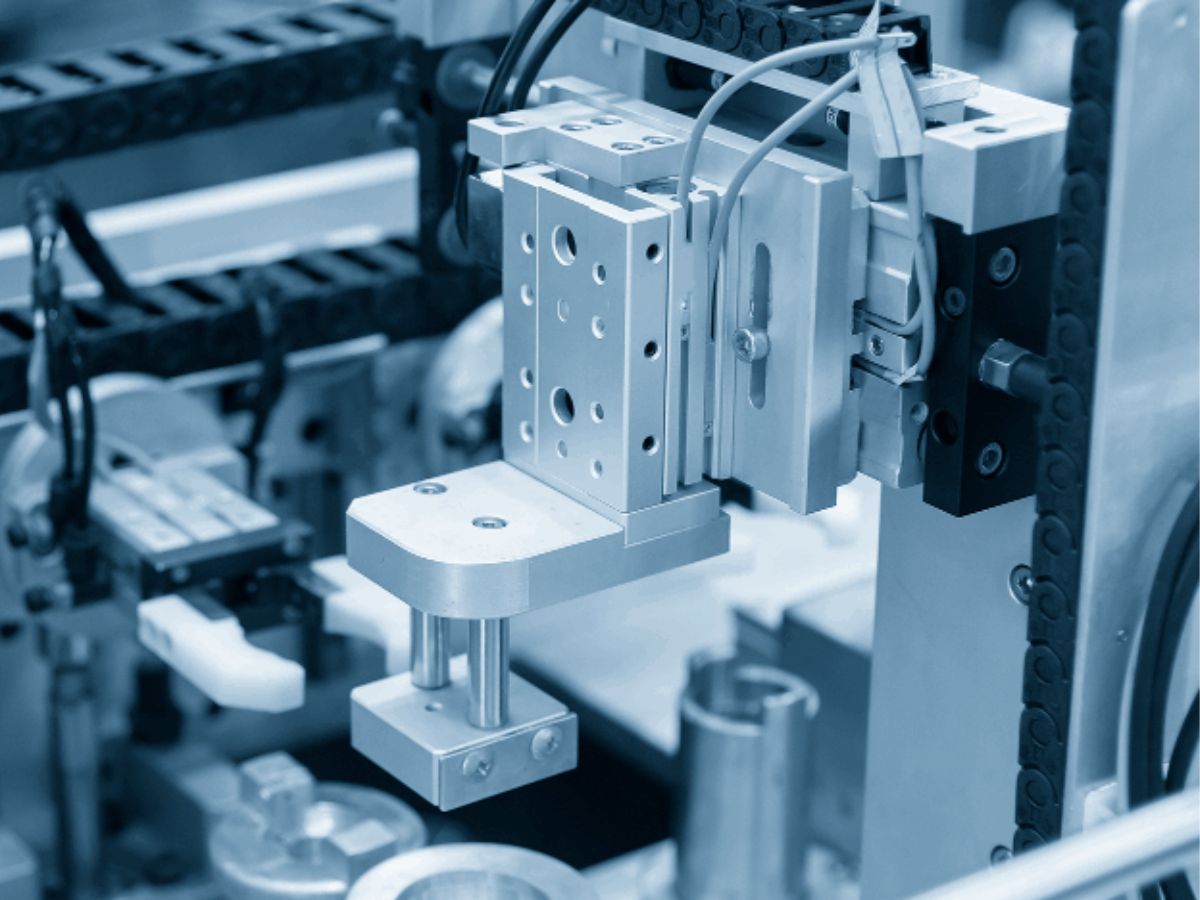
2. Kelepçe Tipi Uç Efektörler
Bunlar, nesneleri güvenli bir şekilde tutmak için mekanik tutucular kullanır ve endüstriyel otomasyonda yaygın olarak kullanılır.
3. Vakum/Emme Tipi Uç Efektörler
Bunlar, cam, ambalaj ve elektronik gibi düz veya hafif öğelerin taşınması için vakum emişi kullanır.
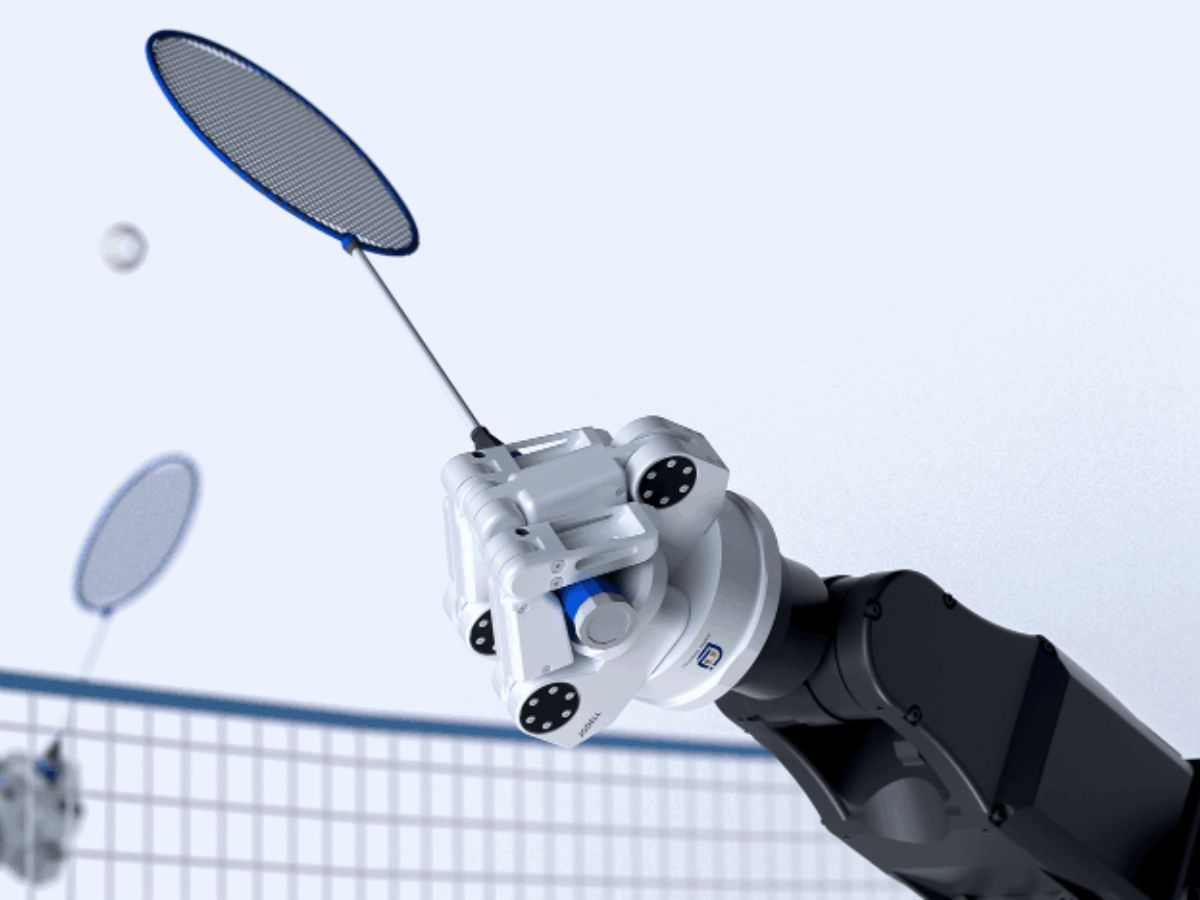
4. Özel Uç Efektörler
Kaynak, boyama, parlatma veya cerrahi gibi belirli görevler için özel olarak tasarlanmış araçlar.
A. Yük Kapasitesi
Hem uç efektörün hem de taşınan nesnenin ağırlığını içerir. Nesnenin ağırlık merkezinin neden olduğu tork, robot bileğinin yük sınırı içinde kalmalıdır.
B. Serbestlik Dereceleri (DOF)
Temel tutucular genellikle bir DOF'a sahiptir (açma/kapama), karmaşık görevler ise birden fazla DOF gerektirebilir, bu da esnekliği artırır ancak maliyeti ve kontrol karmaşıklığını da yükseltir.
C. Hassasiyet ve Tekrarlanabilirlik
Yüksek hassasiyet gerektiren görevler, mikron seviyesinde tekrarlanabilirlik gerektirir. Elektrikli tutucular genellikle pnömatik olanlara göre daha iyi konum kontrolü sunar.
D. Çevresel Uyumluluk
Aşırı sıcaklıklar, temiz odalar veya patlamaya dayanıklı endüstriyel ortamlar için özel tasarımlar gerekebilir.
E. Takım Değiştirici Sistemleri
Otomatik takım değiştiriciler, güvenilir mekanik, elektriksel ve pnömatik/hidrolik bağlantılar aracılığıyla robotların görevler arasında hızlıca geçiş yapmasına olanak tanır.
İnsansı robotların kavrama, taşıma, montaj, bükme ve manipülasyon gibi görevlerde gerçekten insanların yerini alabilmesi için, bu eylemler nihayetinde “eller” aracılığıyla gerçekleştirilmelidir.
Robotun uç efektörü olarak çevik el, robot ile dış dünya arasındaki doğrudan fiziksel arayüz görevi görür. Performansı, robotun pratik kabiliyet sınırlarını temelden belirler.
Çevik eller olmadan, insansı robotlar “görebilir” ve “yürüyebilir,” ancak gerçekten “yapamaz.”
Elon Musk'ın çevik eli Optimus'un geliştirilmesindeki en zorlu teknik zorluklardan biri olarak tanımlamasının nedeni budur.
Yeni nesil modüler insansı çevik el, Linker Hand L30, tüm el genelinde 22 serbestlik derecesine sahiptir ve biyomimetik ilkeleri gelişmiş mekatronik teknolojilerle derinlemesine entegre eder.
Oldukça antropomorfik bir tasarım elde ederken, aynı zamanda yüksek hassasiyetli kontrol ve gerçek zamanlı algılama yeteneklerini de bünyesinde barındırır. Çekirdek eklem hızları 400°/s'yi aşar ve elin tamamen açılması veya kapanması sadece 0.2 saniyede tamamlanabilir.
Yüksek hızlı hareket performansı ve hassas manipülasyonu, canlı gösterimlerde izleyicileri etkilemiştir.
HONPINE’ın çevik eli, kendi geliştirdiği düşük maliyetli tahrik modülleri ile açık kaynaklı algoritma çerçevelerini birleştirerek performans ve maliyet arasında optimum bir denge sağlar.
Bu, Çin’in iyi gelişmiş tedarik zinciri ekosistemi tarafından daha da desteklenmektedir. Ayrıca, endüstriyel ve tıbbi senaryolardaki kapsamlı uygulamalar, hızlı teknolojik yineleme için bol miktarda gerçek dünya verisi sağlar. Bu faktörler birlikte, küresel ölçekte rekabetçi bir “Çin merkezli teknoloji çözümü” oluşturmanın temel dayanağını meydana getirir.
Biyomimetik tendon tahrikli bir yapıdan, yüksek hassasiyetli tork kontrolünden ve hızlı dinamik tepkiden yararlanarak, HONPINE çevik elleri olağanüstü ince manipülasyon kabiliyetleri sergiler.
Çok serbestlik dereceli koordinasyon ve kuvvet kontrollü algının teknik avantajlarını tam olarak ortaya koyarak, hassas, kararlı ve çevik robotik el operasyonlarını mümkün kılar.
Pasif Serbestlik Dereceleri (DoF):
Bu serbestlik dereceleri motorlar tarafından doğrudan tahrik edilmez. Bunun yerine, hareket dişliler, tendonlar veya bağlantı mekanizmaları gibi mekanik elemanlar aracılığıyla iletilir ve dış kuvvetler veya bağlı mafsallar tarafından yönlendirilen uyarlanabilir harekete olanak tanır.
Aktif Serbestlik Dereceleri (DoF):
Bu serbestlik dereceleri motorlar tarafından doğrudan ve otomatik olarak kontrol edilir, bu da hassas, programlanabilir hareket ve kuvvet kontrolü sağlar.
Elin kendisi, yerleşik bir görme sensörünü entegre etmez. Ancak, görsel algıyı etkinleştirmek için harici bir görme modülü eklenebilir.
Dokunsal algı için, temas, basınç ve etkileşim kuvvetlerini algılamak üzere kapasitif veya piezodirençli (dirençli) algılama pedleri gereklidir.
Piezorezistif ve kapasitif sensörlerin özellikleri, özel ürün yapılandırmanıza ve seçim gereksinimlerinize göre sağlanacaktır.
Evet, teleoperasyon eldivenleri sunuyoruz, ve fiyatları piyasadaki çoğu alternatife göre daha rekabetçidir.
Robotikte, uç efektör, dış ortamla etkileşime giren bir robot kolunun ucuna takılan alettir. End-of-Arm Tooling (EOAT) olarak da bilinir, ISO standartlarına göre görev yürütme için robota bir flanş aracılığıyla bağlanan bir cihaz olarak tanımlanır ve robot kolunun kendisinin bir parçası olarak kabul edilmez.
Robot kinematiğinde, uç efektör esasen robotun “eli”dir. Ona bağlı koordinat sistemi takım çerçevesi olarak adlandırılır ve bunun başlangıç noktası genellikle Tool Center Point (TCP) olarak tanımlanır. Kullanıcılar ayrıca belirli görevler için TCP'yi özelleştirebilir, örneğin robotik kaynakta bir kaynak memesinin ucunu TCP olarak ayarlamak gibi.
Yaygın uç efektörler arasında tutucular, takım değiştiriciler, kaynak tabancaları, vakumlu vantuzlar ve püskürtme tabancaları bulunur. Görev performansını ve hassasiyeti artırmak için sensörler de entegre edilebilir.
Robot Uç Efektörünün Uygulaması
Robot uç efektörü, tıbbi otomasyon, lityum pil, 3C, yarı iletken vegıda endüstrileri için endüstriyel becerikli eller, akıllı elektrikli kavrayıcılar, elektriklivantuzlar ve çok işlevli modeller dahil dokuz seri sunar. Kompakt tasarıma sahip aktüatörlerimiz,
hassas kuvvet kontrolü ile yüksek hassasiyet, yüksek rijitlik ve ultra uzun strok sağlar. Ağ uygulamalarını destekler,kurulumu kolaydır ve kullanımı basittir—çeşitli üretim ihtiyaçları için güvenli, verimli otomasyon çözümleri sunar.
‹


›

- 00
0000-00
DD Motor nedir? DD Motor nasıl seçilir?
- 00
0000-00
İnsansı Robot Servo Motoru Nasıl Seçilir?
- 00
0000-00
Robot eklem aktüatörü nedir?En İyi Robot Döner Eklem Aktüatörü Nasıl Seçilir?
- 00
0000-00
DD Motorları VS Harmonik Döner Aktüatörler
- 00
0000-00
Dahili Tork Sensörlü OMG Ultra Kompakt Harmonik Tahrik Eklem Modülü





